Avant de pouvoir construire un multirotor on va devoir comprendre son fonctionnement. Cette partie est très importante pour choisir intelligemment les composants de son quad par la suite.
- Les différents éléments d’un drone
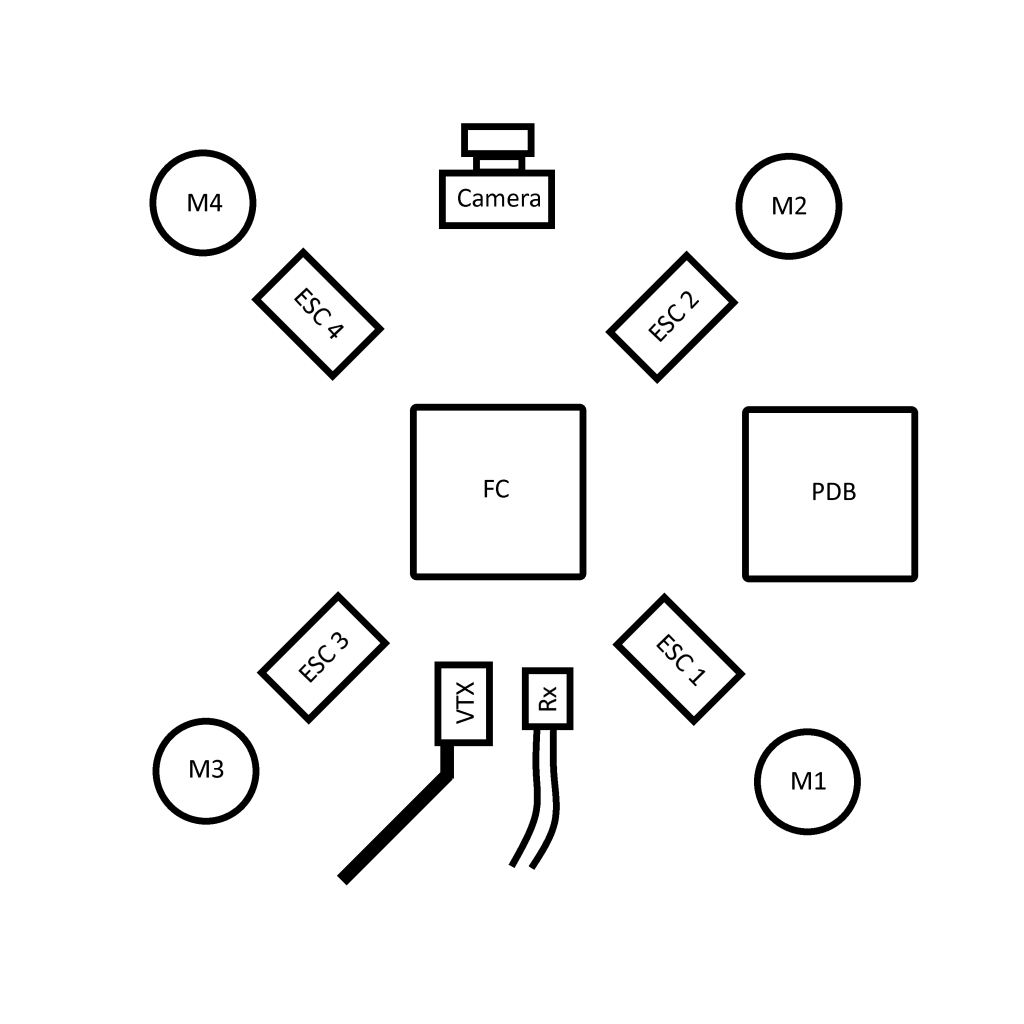
Voici un premier schéma simple représentant un multirotor que nous ferons évoluer par la suite.
Commençons par détailler le nom et le rôle de nos composants.
- La FC : La carte de vol qui est le cerveau de notre drone, c’est elle qui contrôlera celui-ci.
- La PDB : C’est la plaque d’alimentation sur laquelle on branchera la batterie et la grande majorité de nos composants nécessitant une certaine puissance.
- La Camera : C’est grâce à elle que nous allons pouvoir voler en immersion, en FPV!
- Le VTX : Le transmetteur vidéo nous permettra de transmettre la vidéo de la caméra à un écran ou à des lunettes FPV.
- Le Rx : Le récepteur radio permet de transmettre les informations de notre radio directement à la FC pour que nous puissions contrôler notre quad.
- Les Moteurs : Ils représentent la puissance mécanique de notre drone qui est transmise aux hélices pour que le multirotor s’envole.
- Les ESC : Ce sont les Variateurs de Vitesse Electronique (en anglais, Electronic Speed Controler), ils jouent le rôle d’intermédiaire entre la FC et nos moteurs en envoyant la puissance nécessaire aux moteurs en fonction du signal émis par notre FC.
On verra aussi d’autres composants ayant un rôle secondaire comme : la batterie, les hélices, les antennes vidéos et radios, le châssis (la frame) et le câble XT60.
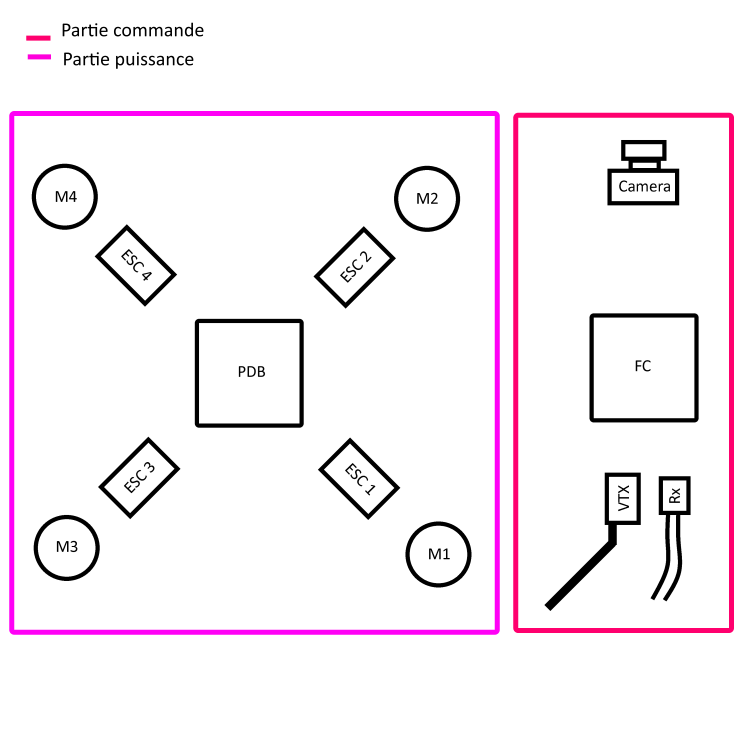
Pour mieux comprendre la suite j’aimerais séparer le multirotor en deux parties : une partie commande (en rouge) et une partie puissance (en violet).
La partie commande est la tête du drone elle permet de nous transmettre une vidéo en direct grâce à la caméra et son VTX. Ensuite le FC va transmettre des ordres à la partie puissance que nous aurons envoyé via notre radio.
La partie puissance permet au drone de voler si on lui en donne l’ordre. En effet, lorsque le FC transmet un ordre à la partie puissance, cela va d’abord passer par les ESC qui vont transformer cet ordre en puissance pour faire fonctionner nos moteurs.
En résumé, lorsque l’on pousse sur le manche des gaz de notre radio, cet ordre va être envoyé par ondes radios jusqu’à notre Rx. Par la suite, le Rx va transmettre cet ordre à notre FC. Ce dernier va traiter l’information et la transmettre à nos ESC. Quand à eux, les ESC vont fournir la puissance nécessaire à nos moteurs pour que le drone décolle. Enfin, la caméra et le VTX vont être les yeux du drone. Ils transmettront une image dans nos lunettes FPV ou sur notre écran.
Vous pouvez maintenant passer à la partie suivante ou revenir au début de l’article
