Ça y est, vos composants viennent d’arriver et vous voulez voler !
Dans cette partie je vais vous conseiller une méthode pour le montage de votre drone, ce qui n’est pas toujours évident. J’essaierai par la suite d’y ajouter plus de photos concrètes de mes montages de quad.
Tout d’abord on va observer le schéma de câblage d’un drone dit classique :
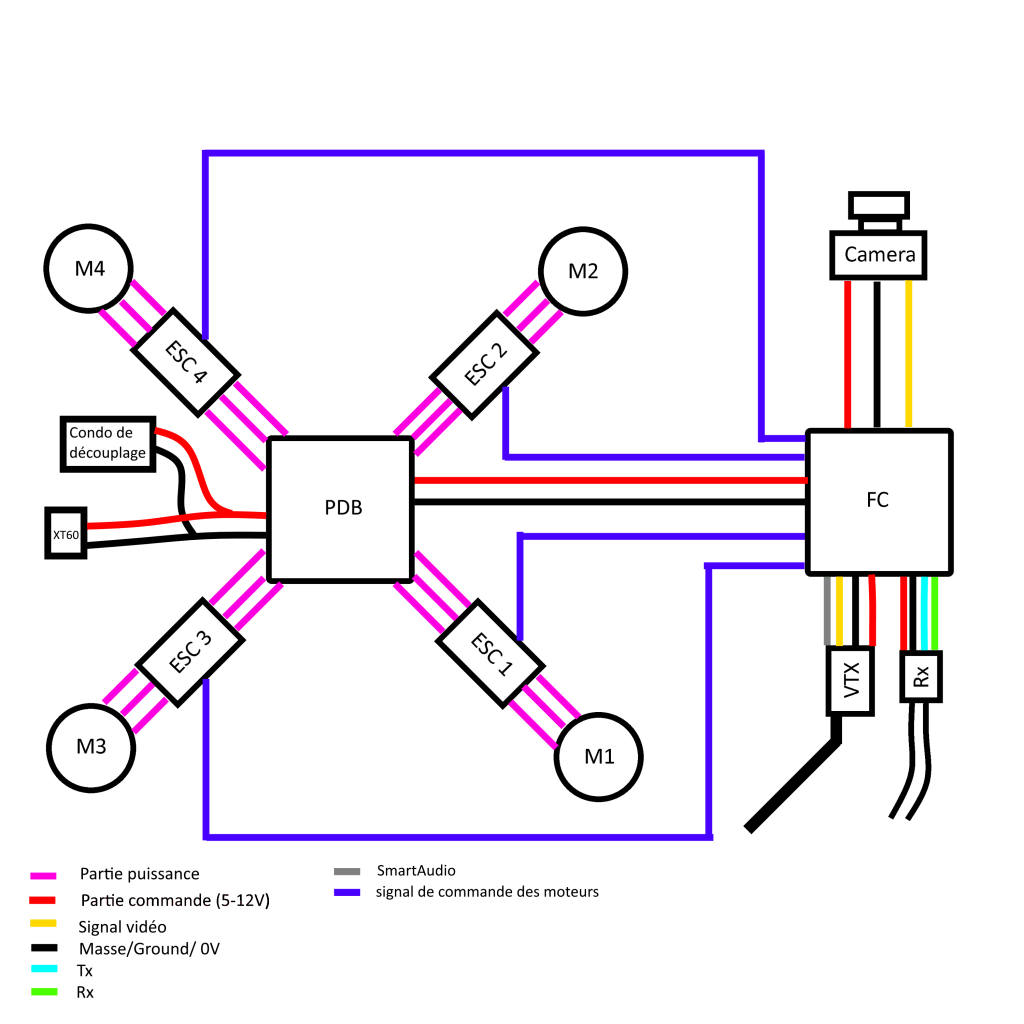
Ce schéma sera votre référence principale pour souder chacun de vos câbles. On observe deux parties distinctes ; la partie puissance qui reçoit directement l’intensité de la batterie et la partie commande qui ne peut pas recevoir autant de courant sous peine de cramer. Ce schéma peut être amovible. En effet, si vous avez des ESC 4 en 1 vos ESC seront déjà reliés à la PDB par exemple. Avant de vous parler de la méthode de montage, j’aimerais parler du condo de découplage qui est un composant qui se branche en parallèle avec la batterie pour réduire les perturbations que la batterie peut créer sur la partie commande.
Lorsque vous montez votre drone vous allez commencer par monter la base de votre châssis pour pouvoir y installer le FC qu’on empilera en général sur la PDB (ou vos ESC 4 en 1). Pour le bon fonctionnement du drone, il est très important que le FC soit situé sur le centre d’inertie du multirotor.
Vous avez maintenant votre FC empilé sur votre PDB, il faut que celui ci soit alimenté par la PDB (dans presque tous les cas en 5V). Cette stack PDB/FC sera le centre de votre drone où chacun des composants sera connecté pour être alimenté, envoyer un signal ou recevoir un signal. Cependant, il ne faudra pas oublier de souder notre câble XT60 à notre PDB pour qu’elle puisse alimenter tout le reste du drone.
Ensuite, on va souder les moteurs. Ceux-ci sont munis de trois câbles de puissances qui viennent se souder sur les ESC qui redirigent ces trois câbles vers la PDB (si on a des ESC 4 en 1, on vient juste souder les trois câbles des moteurs sur la carte 4 en 1 et c’est fini !). Pour inverser le sens de rotation d’un moteur, il suffit simplement d’inverser deux câbles de puissance.
Si vous avez bien fait votre travail la partie puissance devrait être opérationnelle !
Le récepteur radio devra ensuite être connecté au FC pour qu’ils puissent communiquer. Tout d’abord, on soude les câbles d’alimentation du Rx (un fil 0V/ground/masse et l’autre sera généralement du 5V ou du 3.3V) sur une des différentes sorties du FC. Pour communiquer, le Rx a en général un fil nommé Rx et un autre nommé Tx. Ces deux fils doivent être soudés respectivement sur une des entrées Tx et sur une des entrées Rx du FC (un FC a souvent plusieurs entrées de ce type dites « Serial » ; elles sont donc numérotées. Il faudra vous souvenir de ce numéro pour la partie programmation dans votre logiciel de vol comme Betaflight).
Pour ce qui est de la partie vidéo (caméra et VTX), on alimentera d’abord la caméra et le VTX de la même façon que pour le Rx (en récupérant l’entrée d’alimentation adéquate sur le FC). Ensuite, l’objectif sera de faire parvenir le signal vidéo de la caméra au VTX tout en passant par le FC. En effet, en passant par le FC, le signal apportera au VTX des informations importantes telles que la tension de la batterie ou le nombre de mAh consommés. Il faut donc souder le signal vidéo de la caméra sur l’entrée Vin du FC et le signal vidéo du VTX sur la sortie Vout du FC. Pour finir, sur les VTX récents il existe un signal smartAudio qui nous permet de récupérer des informations comme la télémétrie. Celle-ci pourra nous renseigner sur l’état de notre liaison radio, ce qui peut être très intéressant pour savoir quand la portée de notre drone commencera à être limitée. Ce signal Smartaudio devra être branché sur un port serial Tx du FC.
Votre quad est maintenant prêt à être configuré !
Vous pouvez maintenant passer à la partie suivante ou revenir au début de l’article
